
RESEARCH


Research Interests
-
Aerial Robot (Drone) Applications
-
Counter-UAS, Loitering Munition
-
Infrastructure Inspection and Maintenance
-
Wildfire Detection and Monitoring
-
Search and Rescue; Surveillance and Reconnaissance
-
Delivery; Precision Agriculture
-
Urban Air Mobility (UAM); and much more!
-
-
Space Robotics
-
Terrain Relative Navigation; Map-based Localization
-
Extended Robust Autonomy; Navigation on Bland Terrains
-
Safe Landing Site Detection; Slope Estimation
-
Mars Science Helicopter
-
Spacecraft Docking
-
-
Robot/Computer Vision
-
Visual-Inertial Odometry (VIO); Vision-Aided Inertial Navigation Systems (V-INS)
-
Simultaneous Localization and Mapping (SLAM)
-
Visual Language Model(VLM)-based Navigation
-
Sensor Fusion
-
-
Guidance, Navigation, and Control (GNC)
Research Topics
Computer Vision & Robot Perception for Extreme Environments
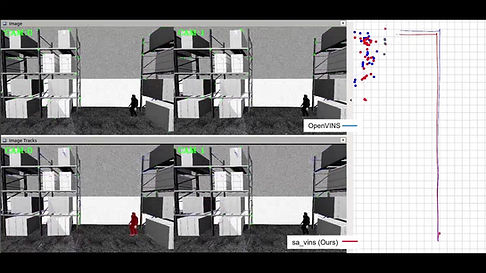
Reliable perception is critical for robots operating in extreme environments, where conditions such as low light, high dynamics, and texture-poor scenes challenge traditional vision systems. To address these challenges, we develop computationally efficient, robustness-aware vision algorithms that perceive and interact with the real world. Through extensive practical experiments, we advance the image-processing front-end of high-precision VIO or VI-SLAM systems, improving estimation consistency, robustness, and accuracy under challenging conditions.
Autonomous GNC Solutions for Unmanned Aircraft, Aerospace Mobility, and Robotics
Safe and seamless navigation is essential for aerospace and robotics platforms operating in GPS-denied or high-risk environments. To address this, we develop state-of-the-art intelligent GNC solutions. By leveraging high-fidelity, tightly coupled multi-sensor fusion tailored to system dynamics, our solutions deliver robust, consistent, and resilient navigation and guidance for safety-critical, real-world operations, validated through extensive field testing.
Autonomy for Multi-Robot Systems
Autonomy is a key enabler of robotic collaboration and coordination under limited communication and line-of-sight constraints. To support this, we investigate distributed, autonomous decision-making that allows multiple heterogeneous robots to share information and make optimized, real-time decisions together, overcoming operational constraints. Field deployments ensure scalable and adaptable collaborative autonomy.